Related Images and Videos : View All
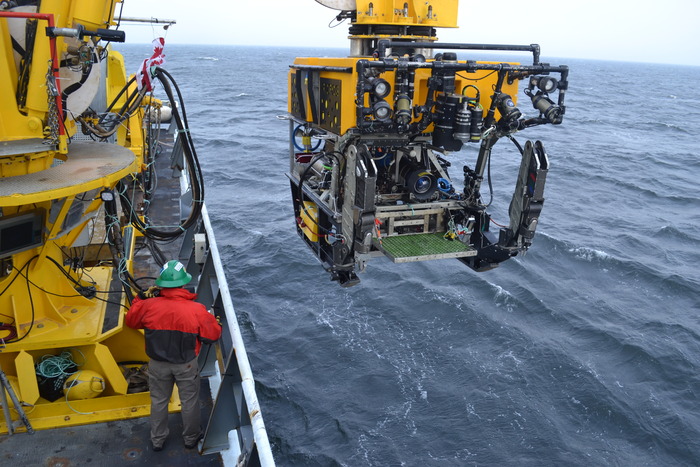
ROV ROPOS V15
ROPOS is operated out of Victoria, British Columbia, by the Canadian Scientific Submersible Facility.

This is the ROPOS control room

ROPOS connecting cable AXVMW4 and strain relief to the junction box on the Deep Profiler mooring at Axial Base.
Photo Credit: NSF-OOI/UW/CSSF, Dive 1742, V14
The Canadian remotely operated vehicle (ROV) called ROPOS is a robotic vehicle used during the UW-OOI-NSF VISIONS'15 expedition to work on much of the Secondary Infrastructure (e.g., instruments, junction boxes, extension cables). For this expedition ROPOS will be configured to work at depths of up to 3000 m. The vehicle is tethered to the R/V Thompson (operated by the University of Washington as part of the UNOLS fleet) by a fiber-optic cable that allows real-time communication to and from the ship and the ROV, as well as providing power to the ROV.
During the OOI-RSN VISIONS '15 dives, ROPOS operations will require three ROV people: a pilot (who operates the vehicle controls); a co-pilot (who monitors the winch that pays in and hauls out the fiber-optic cable attached to ROPOS and who operates the second manipulator arm); and a navigator (who is responsible for making sure the ship and vehicle are in the desired positions).
A team of three scientists and engineers typically stands watches in the ROV control room alongside the ROPOS crew to ensure that the scientific and engineering goals of the cruise are accomplished. Students participating in the UW VISIONS'15 at-sea experiential learning course are also an important component of the watch standers.
The vehicle is equipped with two robotic arms with force feedback manipulators. These are used to deploy the assets, as well as to collect water, geological, and biological samples.
ROPOS is operated out of Victoria, British Columbia, by the Canadian Scientific Submersible Facility. For more information visit the ROPOS website.
