ROV Jason

A diverse suite of displays allow monitoring of ROV operations in the control van during the dive to the Pythias Oasis Site discovered by, then, University of Washington School of Oceanography undergraduate Brendan Philp. The central large display shows the "Gusher" site, ringing by orange anemones and adjacent clams. The Jason manipulator holds a temperature probe used to measure the warm fluids. Credit: M. Elend, University of Washington, V17.

University of Washington School of Oceanography undergraduate students, Katie Gonzalez and Willem Weertman document the Pythias Oasis dive. Credit: M. Elend, University of Washington, V17.
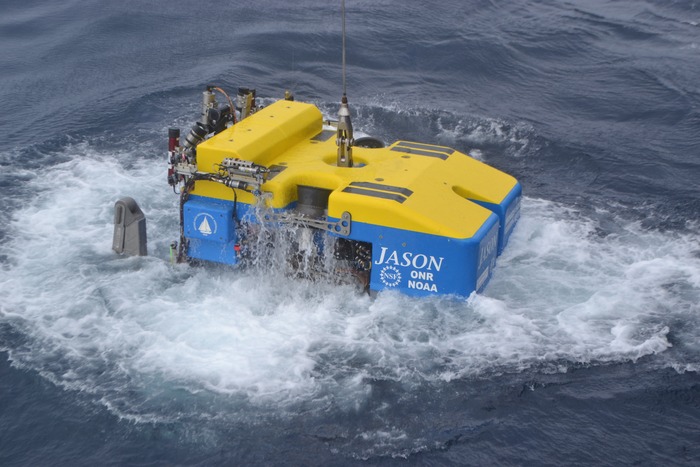
The remotely operated vehicle (ROV) Jason, operated by Woods Hole Oceanographic Institution, is a robotic vehicle that is used to recover and reinstall (turn) much of the Secondary Infrastructure (e.g., instruments, junction boxes) on the Regional Cabled Array. For this expedition Jason will work at water depths of 80 m to 2900 m. The vehicle is tethered to the R/V Roger Revelle by a fiber-optic cable that allows real-time communication to and from the ship and the ROV, as well as providing power to the ROV.
Two years ago, Jason was modified to meet the special requirements for Cabled Array work - these include heavy lift capabilities (up to ~4,000 lbs) and the ability to latch into the junction boxes and Shallow Profiler Mooring components for recovery and reinstallation. As part of this modification, Jason is now a 1-part vehicle system without the need for Medea. Instead floats are used to dampen wave action.
Command and control of the vehicle is done in a stand-alone control van on the Revelle where pilots, navigators, engineers, scientists and students all observe myriad sensor and imagery live feeds from the vehicle streamed up the tether at the speed of light. It is a highly interactive environment: During all dives, live video will be streamed to shore allowing a global audience to watch over our shoulders as we conduct the Cabled Array work.
